Action Chunking with Transformer(ACT), RSS23
Published:
ACT explained.
Motivation
To allievate temporal accumulated errors, so introduce $k$ future actions for current prediction.
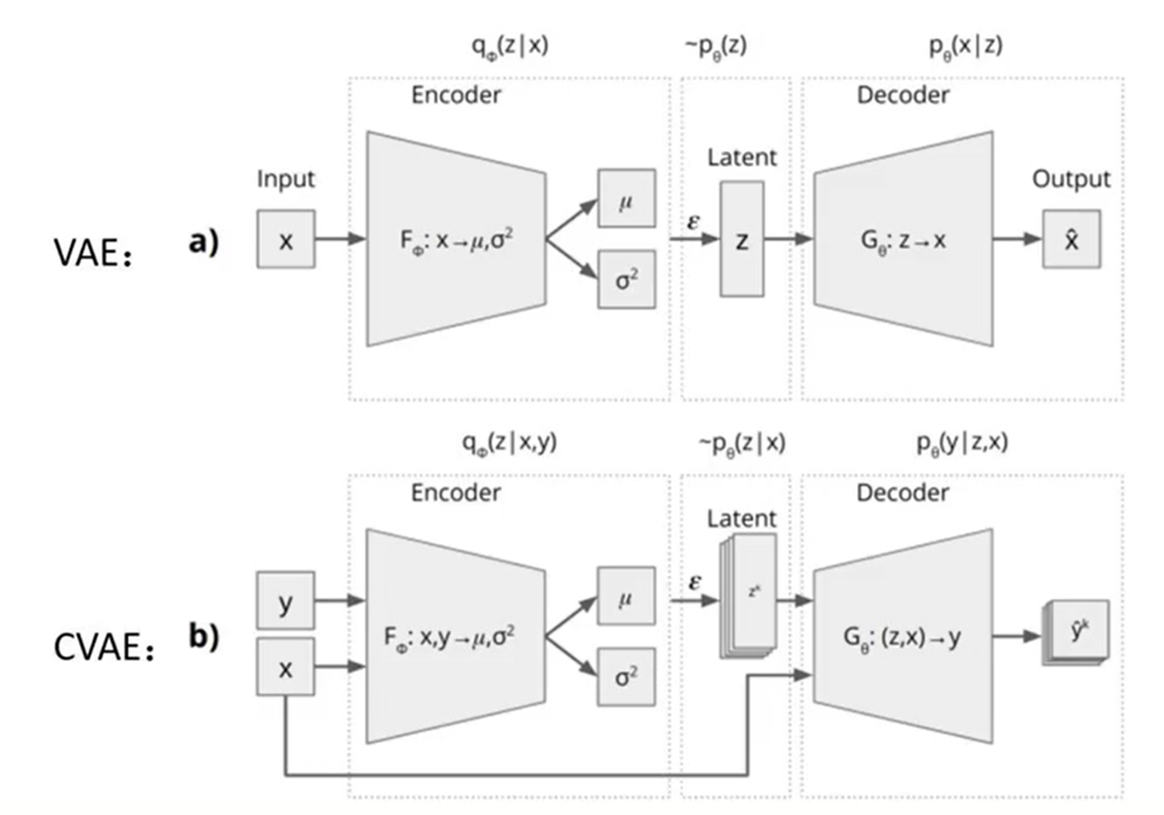
Explanation
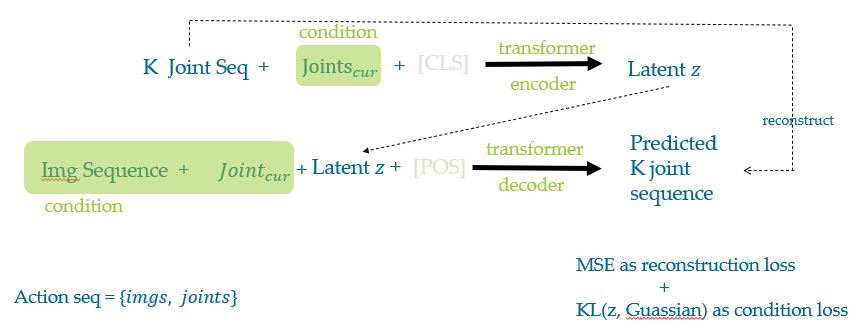
Conditioned Variational Auto Encoder(CVAE), Transformer as encoder and decoder.
Settings
action=${imgs, joints}$
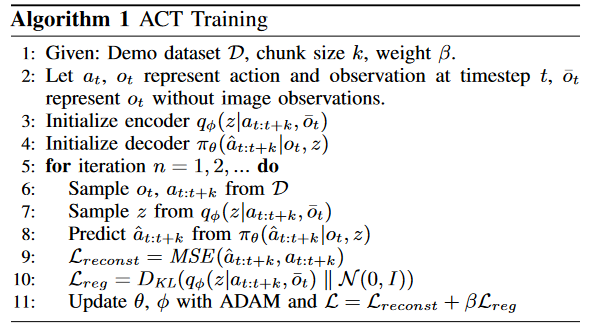
Training
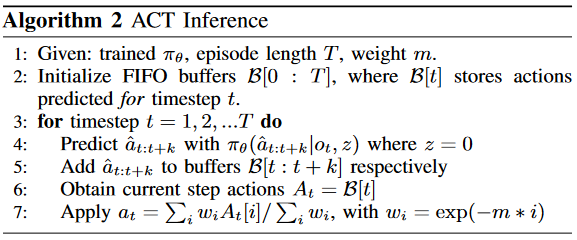
Inference
Mannually set K and K running-average possiblity to esamble current action embedding (to tackle accumulated errors).
Questions
We see the condition is not the same, even though paper claimed that it uses “Conditioned VAE”. It’s a mathematically wrong approach in the first place. We are not even talking about the [CLS] and [POS_EMD] auxiliary input. 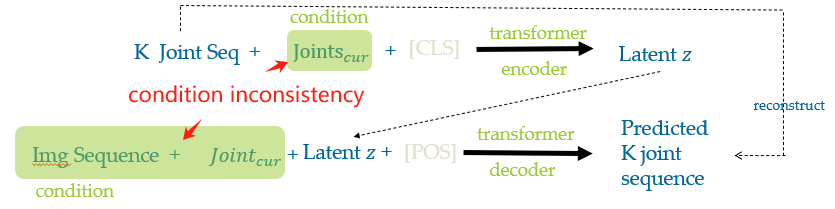
Thoughts & Comments
New Ideas
- Transformer as CVEA encoder and decoder
- K temporal ensamble
Comments
I assume the author would keep the condition the same, but as the ablation experiment goes by, the ablated variaty condition can perform even higher than the original?